Product introduce
The ECT series is a high-performance bus controlled closed-loop stepper driver that integrates.The functions of intelligent motion controllers. The ECT series EtherCAT driver can be used as a standard EtherCAT slave operation, supporting CoE
(CANopen over EtherCAT).
Naming rules
① Series name
EC: Refers to the EtherCAT bus type stepper drive series
② Control type
R: Open loop control
T: Closed-loop control
③ Adapted motor
42: Adapted to 42 stepper motors
57: Adapted to 57~60 stepper motors
86: Adapted to 86 stepper motors
④ Customized code
X2: Can drive two motors simultaneously
Product features
● Supports CoE (CANopen over EtherCAT) and complies with CiA 402 standards
● Supports CSP, PP, PV, and Homing modes
● Minimum synchronization cycle 500us
● Dual port RJ45 connector for EtherCAT communication
● Control methods: open-loop control, closed-loop control/FOC control (supported by ECT series)
● Motor type: two-phase, three-phase
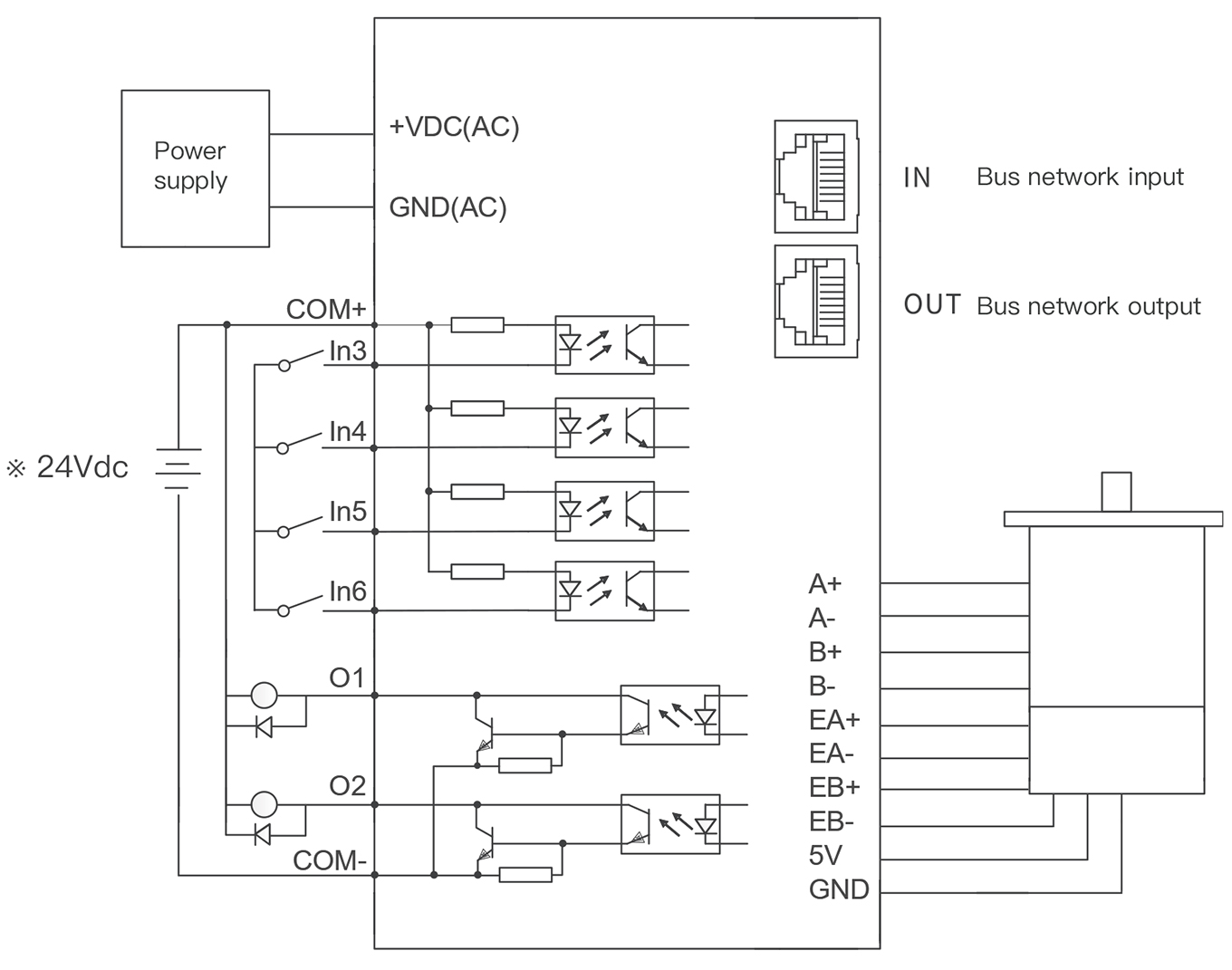
● Digital IO ports:
Four digital signal inputs with photoelectric isolation: IN1 and IN2 are encoder inputs; IN3~IN6 are 24V single ended inputs, with a common anode connection method;
Two digital signal outputs with photoelectric isolation, maximum withstand voltage 30V, maximum input or output current 100mA, common cathode connection.
ECT series driver models
|
ECT driver model |
Input power voltage |
Output peak current (A) |
Default
current(mA) |
Adapted motor |
|
Min |
Typical |
Max |
Min |
Max |
|
ECT57X2 |
24Vdc |
36Vdc |
80Vdc |
0.5 |
6 |
3000 |
below 60 frame |
|
ECT57 |
24Vdc |
36Vdc |
80Vdc |
0.5 |
6 |
3000 |
below 60 frame |
|
ECT86 |
24Vdc |
36Vdc |
80Vdc |
0.5 |
7 |
6000 |
below 86 frame |
Remark
1. Please use CAT5E (or higher level) Ethernet cable.
2. PNP input is not supported.
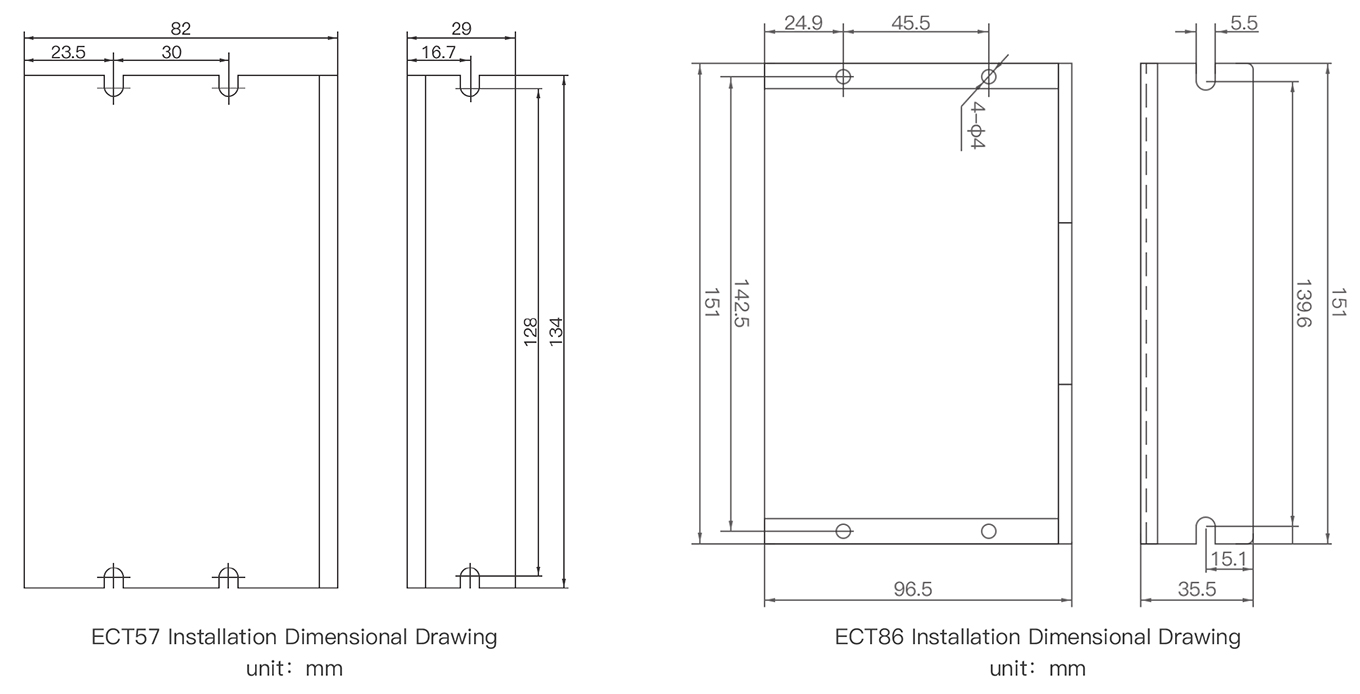
Dimensional drawing
Attention: IN1+/IN1- and IN2+/IN2- are motor encoder input terminal. Do not directly connect input signals above this voltage, otherwise it will cause damage to the driver!




 VIDEO
VIDEO
 CONTACT
CONTACT